

Charakterystyka badań prowadzonych w laboratorium:
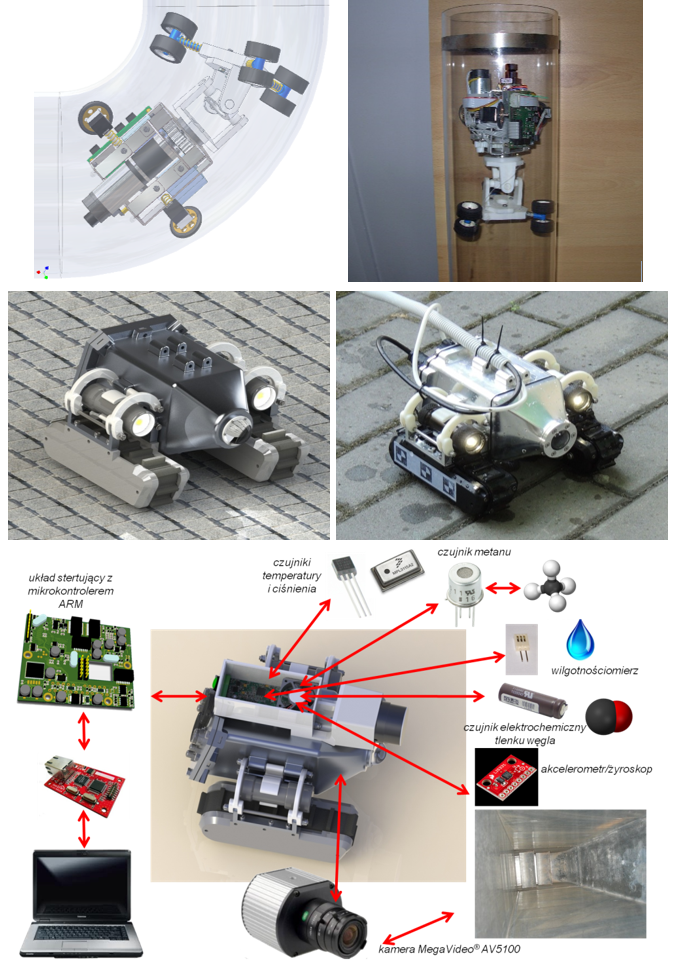
W ramach prac związanych z robotyką inspekcyjną w Katedrze Mechaniki Stosowanej i Robotyki zaprojektowano oraz zbudowano dwie konstrukcje robotów (z napędem śrubowym i gąsienicowy). Umożliwiają one monitorowanie i analizę stanu technicznego powierzchni płaskich, kanałów wentylacyjnych, przewodów rurowych zamocowanych poziomo i pionowo zarówno ,,suchych”, jak i zalanych cieczami. W ramach prowadzonych prac zamodelowano oraz wykonano modułowe konstrukcje z możliwością zmiany konfiguracji i adaptacji robotów do różnych wymogów i potrzeb, zaprojektowano układy sterowania, dobrano elementy elektroniczne oraz napisano oprogramowania sterujące.
Wyszczególnienie główniej aparatury badawczej laboratorium:
- Mobilny robot inspekcyjny z napędem śrubowym,
- Podwodny mobilny robot inspekcyjny z napędem gąsienicowym.
Wykaz prac usługowo-badawczych na potrzeby otoczenia przemysłowego możliwych do realizacji w laboratorium:
-
Badania dotyczące projektowani, modelowania i sterowania robotów inspekcyjnych,
-
Badania dotyczące możliwości implementacji mobilnych systemów inspekcyjnych w różnych środowiskach (podwodnym, wentylacyjnym itp.).
Projekt i budowa robotów była wynikiem zapotrzebowania na tego typu konstrukcje Miejskiego Przedsiębiorstwa Wodociągów i Kanalizacji w Krakowie.